產品介紹
數字油缸 高精度數字油缸 伺服油缸 樸魯供
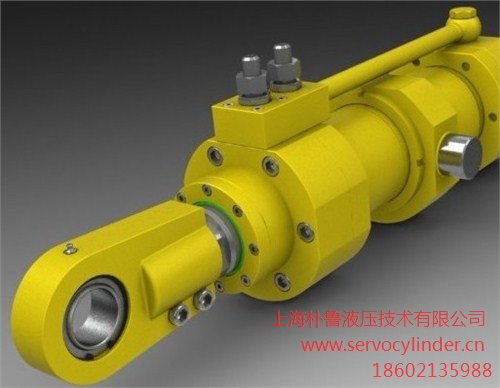
伺服油缸是電液伺服系統中的液壓執行元件�,通過它將液壓能轉變成機械能,伺服油缸通常用于位置�����、速度或力閉環控制的液壓伺服系統中�����。
伺服油缸一般由伺服閥(或高性能比例何服閥)����、油缸和傳感器等組成���,傳感器向伺服控制器傳送反饋電信號�,控制器接收此電信號����,將反饋電信號與輸入電信號進行比校�����,并將兩信號的差值(即誤差信號)作用PID,改變送給伺服閥的指令信號�,伺服閥接收此電信號后自動控制閥開口度(即控制流量或壓力)的大小和方向并操縱伺服油缸的運動和換向,直至誤差為零���。
伺服油缸結構及工作原理可參看原理圖1~3��,雙噴嘴力反饋電液流量伺服 閥裝在閥安裝板上�,閥安裝板將液壓油源的供油����、回油分別和伺服閥的進油口.回油口溶通,伺服液壓缸的兩腔分別和伺服閥的兩負載口溶通; 反饋傳感器為LVDT差動變壓器式位置傳感器�,傳感器的鐵芯裝在活塞桿內腔,裝有激磁和感應線圈的傳感器殼體安裝在球鉸耳座上(圖1)�����。當指令信號為零時����,伺服閥閥芯處于中位��, 四個油口都為關閉狀態���,活塞和位置傳感器均處于機械零位和電器零位(圖2)���。
當給伺服閥輸入一個信號����,此信號使閥芯向右移動(圖3)�����,于是油口1�、3同時被打開,供油通過油口1進入伺服液壓缸右腔����,回油通過油口3與伺服液壓缸左腔溶通,活塞就向左(縮回方向)運動����,位置反饋傳感器就有輸出,因為是負反饋�����,指令信號與反饋信號綜合后誤差信號就逐漸減小,當活塞運動到某一位置��,誤差信號為零時�,伺服閥閥芯就回到中位���,油口 被關閉�,活塞就停在一個與指令信號相對應的位置�,從而實現了對控制對象的位置控制。
若伺服液壓缸的輸出端和控制對象之間裝的是力反饋傳感器(例如拉力或壓力傳感器)���,當活塞運動到作用在控制對象上的力或壓力是反饋信號等于指令信號時��,伺服閥閥芯回到中位,油口關閉�����,活塞停止運動�,控制對象上就受到一個與指令信號相對應的負載力。