產品介紹
薩登24v數碼發電機貨車車載藍牙自啟停招經銷商國內對于汽油機的調速控制算法研究的比較少�,相關的也比較少�����,對變頻逆變控制器的研究一般也集中在SKw以下的功率。也就是小型的汽油發電機相關研究�����,一般是采用高速汽油機的控制��。而國外研究比較多的是日本的一些動力生產廠家����,對于控制調速系統一般還是采用傳統的PID算法來調節汽油機的轉速問題����。目前對控制系統的算法研究,一方面是對傳統的PID控制算法進行改進�����,研究有關參數的整定��、校正等����,來克服PID控制對于非線性系統適應能力不強的缺陷;另一方面是開始嘗試一些的控制算法比如模糊控制算法在汽油機調速系統中的應用�,以及PID算法和模糊控制算法結合的方法���。這種方法能同時利用兩種算法的優點���,并且互補了雙方的缺點,是汽油機調速控制系統的研究方向之一���。 傳統的PID控制算法對于被控對象的數學模型非常依賴,而研究的汽油發電機的運行工況又非常復雜�����,它包括了穩態時候的突加突減負載���,以及一些異常情況需要處理�����,這些工況都不能建立非常準確的數學模型���,而且PID控制還會帶來大的超調量和系統的振蕩問題,所以單單使用傳統PID控制算法的難以達到很好的控制效果�。
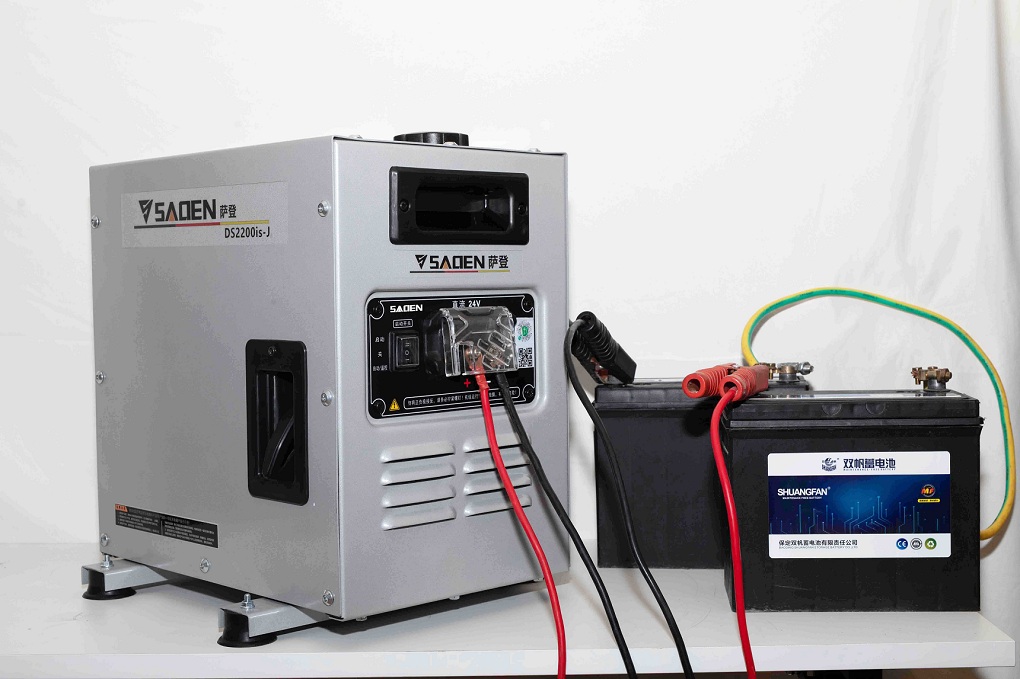
加強版24V直流靜音發電機
品牌 薩登SADEN
產品型號 DS2200is-J
自動啟動 手啟動/電啟動/自啟動/遙控啟動
電機類型 稀土永磁
額定輸出電壓(V) 27 (可調)
額定輸出電流(A) 60
額定功率(KW)
可達功率(KW) 2
功率因數 1
負載運行時間(h) 12
油箱容積(L) 7
機油加注量(L)
噪音DB (A) (7m) 55
絕緣等級 F
防護等級 IP23M
發動機型號 148F
發動機類型 單缸�����、四沖程�����、強制風冷
發動機排量(CC) 79
發動機額定功率(KW) 2
發動機額定轉速(rpm) 4300
運行環境溫度(° C) -20~40
峰值使用海拔高度(m) 4000
外形尺寸(mm)(長X寬X高) 440X289X490
凈重(kg) 28